فیلم آموزش CAN در STM32 – جلسۀ 11 آموزش STM32
جامع ترین آموزش CAN در STM32
در فیلم آموزش CAN در STM32 به تشریح کامل تئوری CAN، تاریخچۀ آن، سخت افزار صنعتی CAN، تشریح کامل آن در ARM STM32 و رجیسترها و نمونه کدهای آن می پردازیم.
۱,۱۸۰,۰۰۰ تومان

تخفیف و هدیه
اخبار جدید یوبرد در اینستاگرام
آموزش های رایگان
لیست آموزش ها
| زمان فیلم آموزشی | 5 ساعت و 33 دقیقه |
|---|

رضا اسدی
دسترسی سریع
دانلود بلافاصله پس از پرداخت
راهنمای استفاده
پلیر اختصاصی، تنها Windows، یک سیستم
فیلم آموزش CAN در STM32 را به عنوان جلسۀ یازدهم فیلم آموزش ARM STM32 یوبرد ارائه کرده ایم. در این جلسه از فیلم آموزش STM32 به آموزش پروتکل ارتباطی CAN در میکروکنترلرهای STM32 می پردازیم و آن را از مباحث اولیه و تئوری CAN آغاز می کنیم و با نمونه کدهای STM32، به پایان می بریم. این پروتکل ارتباطی که در صنعت بسیار مورد استفاده قرار می گیرد و یک پروتکل ارتباطی بسیار مهم در صنعت است، در برخی میکروکنترلرهای ARM STM32 وجود دارد. CAN یک پروتکل ارتباطی پیام محور است و در شبکۀ CAN، تعدادی المان فرستنده و گیرنده وجود دارند و هر المان، پیام خود را روی خط CAN می فرستد. پیام ارسال شده در شبکۀ CAN، توسط المان هایی که آن را نیاز دارند، دریافت می شود و بدین ترتیب، یک پیام در شبکۀ CAN منتقل می شود. لایه های پروتکل ارتباطی CAN عبارتند از لایۀ Application، لایۀ Data link و لایۀ فیزیکی. لایۀ Application همان نرم افزاری است که با آن، پروتکل ارتباطی CAN میکروکنترلر را راه اندازی می کنیم و به ارسال و دریافت پیام می پردازیم. لایۀ Data link، همان واحد داخلی CAN در میکروکنترلر است که با نام CAN Controller نیز شناخته می شود و لایۀ فیزیکی نیز، یک آی سی است که رابط بین CAN controller و خط CAN است و CAN Transceiver نیز نامیده می شود.
ویدئوی 1 – معرفی آموزش CAN در STM32
همان طور که ذکر شد، CAN یک پروتکل ارتباطی بسیار مهم است و در صنعت کاربردهای فراوانی دارد. بنابراین یادگیری کار با این پروتکل در میکروکنترلرها و همچنین استفاده از آن در پروژه های مبتنی بر میکروکنترلر، از اهمیت ویژه ای برخوردار است. در این جلسه به آموزش CAN در میکروکنترلرهای STM32 می پردازیم و ابتدا مباحث مقدماتی و تئوری CAN را تشریح می کنیم. سپس سخت افزار CAN مورد نیاز پروژه های صنعتی را بررسی می کنیم. پس از آن، CAN را در میکروکنترلرهای ARM STM32 مورد بحث و بررسی قرار می دهیم و در نهایت، پس از شرح رجیسترهای CAN در STM32، نمونه کدهای راه اندازی CAN در STM32 را نیز تشریح می کنیم و نتیجۀ آنها را در عمل می بینیم. در ادامه به مباحث مطرح شده در فیلم آموزش CAN در STM32 می پردازیم.
فیلم آموزش میکروکنترلرهای AVR مقدماتی
جلسات آموزش STM32 بصورت مجزا قابل تهیه است:
- فیلم مقدمه آموزش STM32 – جلسۀ 1 آموزش STM32 (رایگان – 4 ساعت)
- فیلم آموزش GPIO در STM32 – جلسۀ 2 آموزش STM32
- فیلم آموزش کلاک و Reset در STM32 – جلسۀ 3 آموزش STM32
- فیلم آموزش وقفه در STM32 – جلسۀ 4 آموزش STM32
- فیلم آموزش ADC در STM32 – جلسۀ 5 آموزش STM32
- فیلم آموزش تایمر در STM32، مقدماتی – جلسۀ 6 آموزش STM32
- فیلم آموزش تایمر پیشرفته در STM32 – جلسۀ 7 آموزش STM32
- فیلم آموزش USART در STM32 – جلسۀ 8 آموزش STM32
- فیلم آموزش RTC در STM32 – جلسۀ 9 آموزش STM32
- فیلم آموزش DAC در STM32 – جلسۀ 10 آموزش STM32
پک های آموزش STM32:
جلسات پیشرفتۀ آموزش STM32:
همچنین:
تصویر 1 – آموزش ARM STM32، آموزش CAN Bus در STM32
سرفصل های فیلم آموزش CAN در STM32
موضوعات مورد بحث فیلم آموزش پروتکل CAN در STM32 عبارتند از:
- تعریف پروتکل CAN: در ابتدای این جلسه از فیلم آموزش ARM STM32 به تعریف پروتکل ارتباطی CAN و هدف ساخت آن می پردازیم.
- تاریخچۀ CAN: دربارۀ تاریخچۀ به وجود آمدن CAN، شرکت سازندۀ آن و استانداردهای مرتبط با CAN می پردازیم.
- لایه های پروتکل های ارتباطی در مدل OSI: در این بخش از فیلم آموزش STM32 دربارۀ لایه های مدل OSI پروتکل های ارتباطی صحبت می کنیم و همچنین لایه های CAN را توضیح می دهیم.
- کاربردهای CAN در صنعت: در این قسمت از فیلم آموزش CAN در میکروکنترلرهای ARM STM32، کاربردهای CAN را در صنایع مختلف ذکر می کنیم و همچنین کاربردهای آن را در صنعت خودرو، صنعت آسانسور و صنعت نفت شرح می دهیم.
- بستر پروتکل CAN: این بخش از فیلم آموزش ARM STM32 شامل لایۀ Application و CAN controller و CAN transceiver است. بستر CAN را هم با میکروکنترلرهایی که واحد CAN داخلی دارند و هم با میکروکنترلرهای بدون واحد CAN داخلی (با CAN controllerهای خارجی)، تشریح می کنیم.
- انتقال داده در CAN: در این بخش از فیلم آموزش CAN در STM32، مراحل انتقال داده را در پروتکل CAN، با نکات آن بررسی می کنیم. همچنین دربارۀ سیگنال های روی خطوط CANH و CANL صحبت می کنیم.
- لایه های پروتکل CAN: در این بخش از جلسۀ یازدهم فیلم آموزش STM32 لایه های CAN را با جزئیات و نکات بیشتر بررسی می کنیم. در این بخش، حین تشریح لایۀ فیزیکی، سیگنال های CAN را نیز تشریح می کنیم.
- فریم داده در پروتکل CAN: فریم داده در CAN، شامل بیت های ID پیام (Arbitration)، بیت های کنترلی، بیت های داده، CRC و … است. در CAN چهار نوع فریم استاندارد، ریموت، ارور و Overload وجود دارد که همۀ آنها را با جزئیات و نکاتشان در این بخش از آموزش ARM STM32 شرح می دهیم.
- رویکردهای CAN: که روش ها و الزاماتی در لایۀ Application برای استفاده از CAN هستند. در این بخش از آموزش CAN در میکروکنترلرهای ARM STM32 به برخی از آنها اشاره می کنیم. که برخی از این رویکردها عبارتند از CANopen و CANopen in rail vehicle و DeviceNet و EnergyBus و ISOBUS و … .
- سخت افزار صنعتی CAN: در این بخش، شماتیک سخت افزارهای صنعتی RS232 و RS485 و CAN را تشریح می کنیم. نحوۀ اتصالات آی سی های مورد استفاده در RS232 و RS485 و CAN، مدارهای مورد نیاز این آی سی ها، مدارهای حفاظتی، مدارهای حذف نویز و همچنین مقادیر صحیح المان های به کار رفته در این مدارها، در این بخش مورد بحث و بررسی قرار می گیرند.
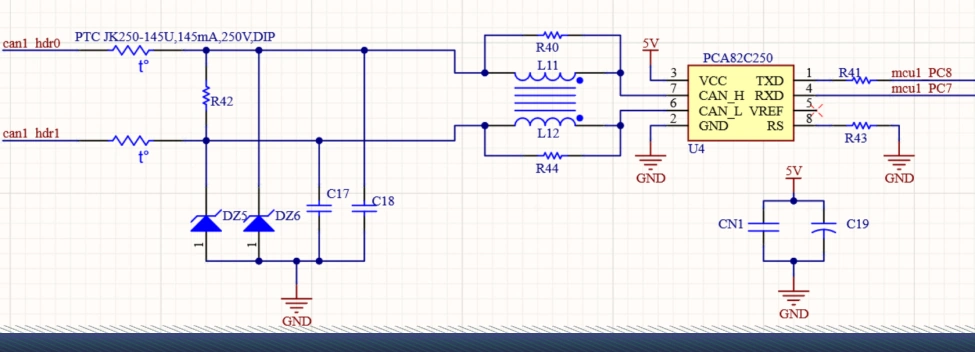
تصویر 2 – فیلم آموزش CAN در STM32، شماتیک یک سخت افزار صنعتی برای CAN
- آموزش CAN در STM32: که به شرح CAN در میکروکنترلرهای STM32 می پردازیم. در این بخش، CAN را از رفرنس منوال میکروکنترلرهای ARM STM32F4 تشریح می کنیم و عملکرد و تئوری CAN را در این میکروکنترلرها به طور کامل بررسی می کنیم.
- آموزش رجیسترهای CAN در STM32: که رجیسترهای CAN را در میکروکنترلرهای STM32 تشریح می کنیم و عملکرد هر یک از بیت های آنها را توضیح می دهیم.
- Bit timing یا Baud rate در CAN: که به مباحثی مثل Bit time و Baud rate و Bit segment و TQ و Phase segment و Propagation segment و …، با توضیح نکات لازم می پردازیم.
- نمونه کدهای CAN در STM32: که عبارتند از نمونه کد رجیستری CAN در STM32 و نمونه کد CAN در STM32 با HAL. در این بخش این نمونه کدها را تشریح می کنیم و به راه اندازی رجیستری CAN در STM32 و راه اندازی CAN در STM32 با HAL می پردازیم.
شرح مباحث CAN در این جلسه از آموزش میکروکنترلرهای ARM STM32، به گونه ای است که دانش پذیر پس از آن، با پروتکل ارتباطی CAN به طور کامل آشنا می شود و می تواند CAN را در پروژه های صنعتی خود به کار گیرد و علاوه بر نوشتن نرم افزار CAN، سخت افزار صنعتی آن را نیز طراحی کند.
پیش نمایش – کاربردهای پروتکل CAN
پیش نمایش – مبحث Master و Slave پروتکل CAN در STM32
آمریکا در زمینۀ طراحی بردهای فرکانس بالا در یک شرکت بسیارخوب مشغول بکار شدم. پیشنهاد می کنم شما هم از راهنمایی های آقای اسدی استفاده کنید.
توصیه می کنم کسانی که پروژه های اکسپرت دارن، حداقل یک مرتبه جلسات خصوصی رو امتحان کنن.
به جرئت می تونم بگم آقای اسدی بهترین مدرسی بودن که باهاشون آشنا شدم.









آموزش های رایگان یوبرد، فقط تلاش کن
پروژه های دانش پذیران آموزش های یوبرد، نتایج مکتب سیستم های دیجیتال
سفارش پروژه میکروکنترلر، زیرساخت مطمئن صنعت
مشاوره آموزشی و شغلی یوبرد، نقشۀ گنج
دیگر آموزش های یوبرد











