")
سامانه GNSS که مخفف عبارت Global Navigation Satellite System و به معنای سامانه ماهواره ای ناوبری جهانی است، مجموعۀ سامانه موقعیت یاب جهانی و محلی است. یعنی برای موقعیت یابی توسط سامانه GNSS هم سیستم های ماهواره ای (مثل GPS) و هم سیستم های موقعیت یاب محلی مورد استفاده قرار می گیرند. سامانه GNSS یک سیستم تعیین موقعیت جهانی است، یعنی در همه جای دنیا می توان از طریق سامانه GNSS به موقعیت یابی پرداخت. در نوشتۀ «معرفی نسل های شبکه تلفن همراه از G1 تا G5» و «معرفی بلوتوث، پروفایل های بلوتوث و نسخه های بلوتوث» به بررسی بخشی از پیش نیازهای آموزش ماژول های SIM800 پرداختیم. در این نوشته به معرفی سامانه های موقعیت یاب جهانی و محلی از جمله LPS و GPS و همچنین سامانه GNSS می پردازیم و اصطلاحات و ویژگی های این سامانه های موقعیت یاب را بررسی می کنیم.
امروزه علاقه مندان، مهندسان و دانشجویان رشته های برق، الکترونیک، مخابرات و همچنین تولید کنندگان نیاز به اتصال سیستم مورد نظر خود به سامانه های موقعیت یاب مثل سامانه GNSS، به صورت مطمئن دارند. اگر بدون اطلاعات اولیه، کار با ماژول های دارای سیستم های GPS و سامانه GNSS از جمله ماژول های NEO و یا SIM808 را شروع کرده باشید، مطمئناً در حین انجام پروژه به اطلاعاتی نیاز پیدا خواهید کرد. در ادامه به معرفی سامانه های موقعیت یاب محلی و سامانه های موقعیت یاب جهانی و همچنین سامانه GNSS می پردازیم.
سامانه موقعیت یاب محلی بدون استفاده از ماهواره، ناوبری هذلولوی LPS
پیش از به وجود آمدن سامانه GNSS و همچنین سامانه های ماهواره ای ناوبری جهانی از سامانه های ناوبری محلی استفاده می شده است. ایدۀ موقعیت یابی در ابتدا با استفاده از ایستگاه های فرستنده رادیویی موج بلند زمینی به منظور تشخیص موقعیت کشتی ها و هواپیماها، محقق شد. در آن زمان که از دکل های مخابراتی به منظور فراهم کردن این بستر ارتباطی استفاده می شد، شاید کسی تصور نمی کرد که سامانه های ناوبری در آینده با استفاده از تعدادی ماهواره و با دقتی که امروزه در دسترس عموم و کاربردهای نظامی موجود هست، برسد. روش کار در این سیستم ها به این شکل بوده که گیرنده با محاسبه فاصله زمانی سیگنال رفت و برگشت بین دکل و گیرنده، به فاصله تا هر ایستگاه و در نتیجه به موقعیت خود دست می یافت. به ناوبری که از الگوی فاصله زمانی سیگنال های رفت و برگشت برای موقعیت یابی استفاده کند، ناوبری هذلولوی گفته می شود. با توجه به این که این سامانه ها در سطح جهان به صورت یکپارچه نبوده و تنها در برخی مناطق مورد استفاده قرار می گیرند، به آنها LPS یا Local Positioning System به معنای سامانه موقعیت یاب محلی یا سیستم تعیین موقعیت محلی گفته می شود.
اولین سامانه ناوبری با استفاده از الگوی ناوبری هذلولوی در جنگ جهانی دوم با نام GEE برای استفاده در موقعیت یابی بمب افکن ها مورد استفاده قرار گرفت. نمونۀ ارتقا یافتۀ این سامانه نیز با نام Decca در سال ۱۹۴۴ مورد استفاده قرار گرفت. همچنین نیروی دریایی آمریکا با سیستم LORAN-C با هدف ناوبری دوربرد در دریا این سیستم را استفاده می کرد. پس از جنگ جهانی، اتحاد جماهیر شوروی نیز سیستم های Alpha و CHAYKA را که از ناوبری هذلولوی استفاده می کردند به کار گرفت. سامانۀ ناوبری محلی ایرانی نیز هدی نام دارد. امروزه از این نوع سامانه ها می توان به عنوان یک سیستم کمکی در کنار سامانه های ماهواره ای موقعیت یاب جهانی همچون GPS استفاده کرد.
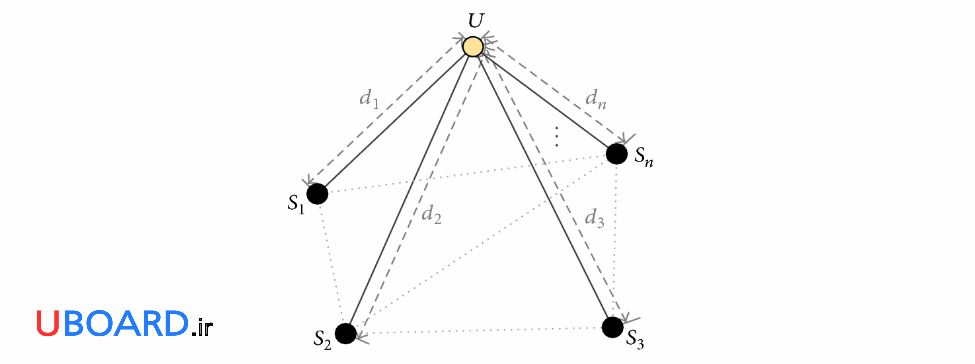
تصویر 1 – سامانه موقعیت یاب محلی بدون استفاده از ماهواره
سامانه GNSS، سامانه ماهواره ای ناوبری جهانی و محلی
برخی تصور می کنند که سامانه GNSS به سامانه های ماهواره ای موقعیت یاب جهانی گفته می شود. اما سامانه GNSS به مجموعۀ سامانه های ماهواره ای ناوبری جهانی و سامانه های موقعیت یاب محلی اطلاق می شود. این سامانه ها با انتشار سیگنال های رادیویی، به گیرنده های زمینی این امکان را می دهند که به تعیین موقعیت و برخی اطلاعات دیگر از جمله سرعت حرکت خود بر روی زمین، جهت قرار گیری خود نسبت به شمال جغرافیایی و ساعت UTC (مخفف Coordinated Universal Time) و … دست یابند. سامانه های ماهواره ای ناوبری جهانی از ماهواره هایی تشکیل شده است که اطلاعات را برای گیرنده های زمینی ارسال می کنند. پیدایش سامانه های ماهواره ای ناوبری جهانی از ابتدا با هدف استفاده در کاربردهای نظامی بوده است. برای مثال با هدایت موشک با استفاده از این سامانه ها، می توان دقت بسیار بیشتری را نسبت به روش های دیگر بدست آورد.
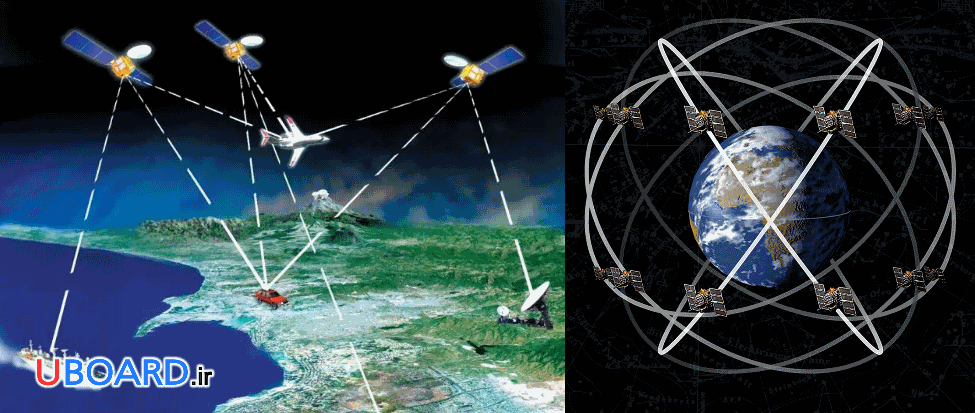
تصویر 2 – ماهواره های GPS (سمت راست) و سامانه GNSS (سمت چپ)
فعالیت در زمینۀ سامانه های ماهواره ای ناوبری جهانی توسط آمریکا در سال 1973 و سپس توسط اتحاد جماهیر شوروی در سال 1976 آغاز شد. پروژۀ آمریکا تحت عنوان GPS (مخفف Global Positioning System) و پروژۀ اتحاد جماهیر شوروی تحت عنوان GLONASS (مخفف GLObal NAvigation Satellite System) نام گرفت. در حال حاضر تنها این دو پروژه توانسته اند که تمامی کرۀ زمین را تحت پوشش قرار دهند.
سامانه های GPS و GLONASS یک سری تفاوت ها دارند. به طور مثال در برخی مناطق پوشش دهی GPS و در برخی مناطق GLONASS بهتر است. امروزه از تفاوت این دو سامانه نسبت به هم استفاده شده و چیپ هایی که امروزه در تلفن های همراه به منظور استفاده از شبکه های سامانه GNSS وجود دارد از هر دو سامانۀ GLONASS و GPS استفاده می کنند. در این روش دقت بسیار افزایش یافته است.
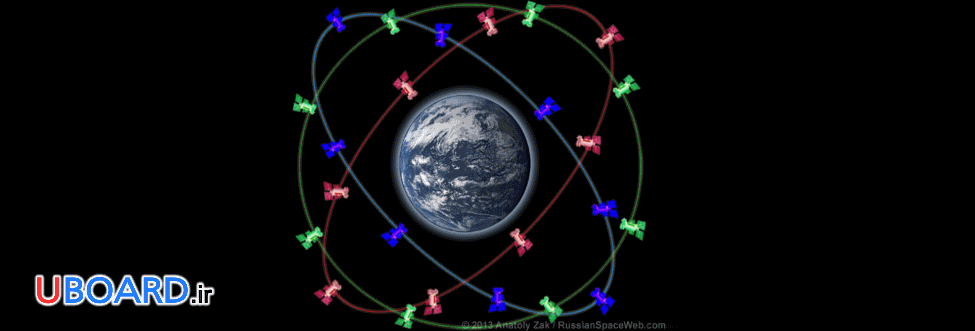
تصویر 3 – ماهواره های GLONASS
به طور مثال چنانچه در یک آپارتمان، دادۀ خروجی یک ماژول GPS را بخوانید، در حدود 500 تا 1000 متر خطا خواهد داشت. اما چنانچه در همین ساختمان از ماژول های دارای سامانه GNSS استفاده کنید، دقت به کمتر از ده متر کاهش پیدا خواهد کرد. برای تست این شرایط، می توانید از ماژول هایی همچون SIM808 که دارای سامانه GNSS است، استفاده کنید. به این صورت که یک مرتبه موقعیت را با استفاده از دستورات GPS و یک مرتبه با استفاده از دستورات سامانه GNSS قرائت کنید. ویژگی های ماژول SIM808 در نوشتۀ «معرفی ویژگی های ماژول های SIM800 شرکت SIMCOM» معرفی شده اند.
به صورت تقریبی دقت GPS را در شرایط مختلف در جدول زیر می بینید.
| محیط | خطای GPS |
| فضای باز | کمتر از 7 متر |
| درون اتوموبیل | کمتر از 10 متر |
| در خانۀ کمتر از دو طبقه | کمتر از 50 متر |
| در آپارتمان | کمتر از 1000 متر |
| در جنگل | کمتر از 200 متر |
| در هواپیما | کمتر از 50 متر |
| در هواپیما و در کنار پنجره | کمتر از 30 متر |
| در تونل | عدم پوشش |
| زیر پل | عدم پوشش |
جدول 1 – خطای GPS در محیط های مختلف
آمریکا یا شوروی می توانند در هر زمان، به طور مثال در زمان جنگ، سرویس GPS و GLONASS را برای کشورهای مورد نظر غیر فعال کنند و این امر به همراه برخی دلایلی دیگر باعث شده که دیگر کشورها نیز در فکر ساخت چنین سامانه هایی به صورت محلی یا سراسری باشند. به طور مثال دو پروژۀ مهم دیگر که قرار بر این است تا سال 2020 همچون GPS و GLONASS به صورت سراسری سرویس دهی کنند، پروژه Galileo در اروپا و BeiDou در چین است. همچنین دو پروژه مطرح دیگر به نام QZSS در ژاپن و همچنین IRNSS در هند است که به صورت محلی در کشور خود و مناطق اطراف در حال سرویس دهی هستند. این پروژه های محلی نیز ممکن است در آینده به پروژه های سراسری تبدیل شوند.
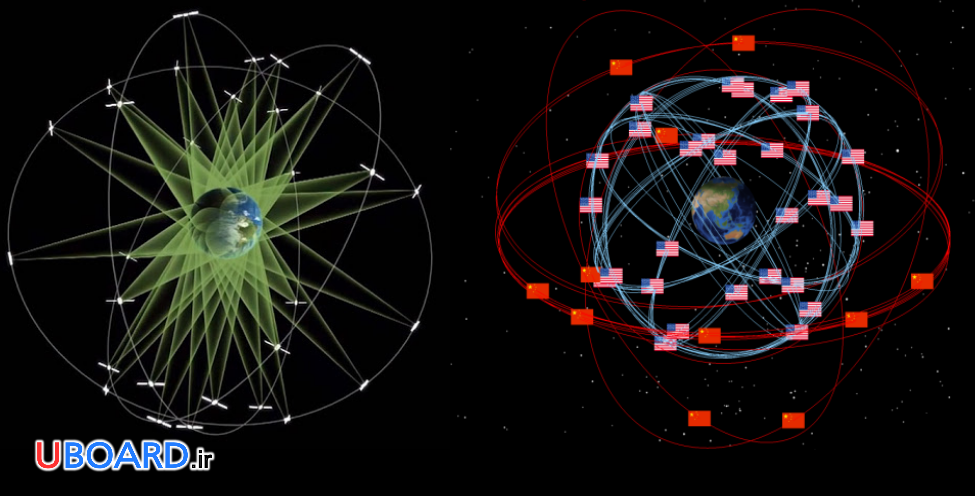
تصویر 4 – ماهواره های Galileo و پوشش آن (سمت چپ)، ماهواره های BeiDou و GPS (سمت راست)
داده خروجی GPS با چه فرمتی است؟ NMEA چیست؟
اگر قبل از اطلاعات دربارۀ داده خروجی GPS و همچنین انجمن NMEA، کار با ماژول های دارای GPS از جمله SIM808 را شروع کرده و با ارسال یک AT Command قصد قرائت خروجی ماژول را داشته باشید، حتما مشاهده کرده اید که در حالت ها و AT Commandهای مختلف، اعدادی در فرمت های متفاوت دریافت می کنیم. برای انتقال انواع مختلف از اطلاعات، استانداردهای مختلفی به وجود آمده است.
NMEA (مخفف National Marine Electronics Association) یک موسسه است که برای انتقال داده های سامانه های ناوبری ماهواره ای، یک استاندارد به شماره NMEA 0183 بنا نهاده است. بدیهی است که اگر چنین استانداردی وجود نداشت و هر فرستنده GPS با یک فرمت متفاوت دادۀ خروجی خود را ارسال می کرد، در سمت گیرنده نیز نوشتن نرم افزارهایی که فرمت های مختلف را تحلیل، مقایسه و عملیات مختلفی بر روی آنها انجام دهد، پیچیده تر می شد. از جمله این نرم افزارها می توان به Google Map و Visual GPS اشاره کرد. حال پس از بیان ماهیت و اهمیت NMEA به تشریح ساختار این استاندارد می پردازیم.
در این استاندارد پیام ها در چند قالب می توانند ارسال شوند که این قالب های استاندارد، یک سری اطلاعات مشابه و همچنین یک سری اطلاعات مکمل هم را در بر دارند. قبل از ادامه مبحث، نام تمامی این قالب ها به صورت تیتر وار آورده شده است.
- BWC – Bearing using Great Circle route
- DTM – Datum being used
- GGA – Fix information
- GLL – Lat/Lon data
- GRS – GPS Range Residuals
- GSA – Overall Satellite data
- GST – GPS Pseudorange Noise Statistics
- GSV – Detailed Satellite data
- MSK – send control for a beacon receiver
- MSS – Beacon receiver status information
- RMA – recommended Loran data
- RMB – recommended navigation data for gps
- RMC – recommended minimum data for gps
- RTE – route message
- TRF – Transit Fix Data
- STN – Multiple Data ID
- VBW – dual Ground/Water Spped
- VTG – Vector track an Speed over the Ground
- WCV – Waypoint closure velocity (Velocity Made Good)
- WPL – Waypoint Location information
- XTC – cross track error
- XTE – measured cross track error
- ZTG – Zulu (UTC) time and time to go (to destination)
- ZDA – Date and Time
قالب های داده GPS در ماژول SIM808
هر ماژول موقعیت یاب، از یک سری از این قالب ها پشتیبانی می کند. به طور مثال در ماژول SIM808 در زمانی که از AT Commandهای مربوط به GPS استفاده می شود، می توان از قالب های شمارۀ 3 و 4 و 6 و 8 و 13 و 18 و 24 استفاده کرد و در زمانی که از AT Commandهای مربوط به سامانه GNSS استفاده می شود می توان قالب های شمارۀ 3 و 6 و 8 و 13 را به کار برد. با توجه به مختصر توضیحات جلوی نام هریک از فرمت ها، می توان به محتوای هریک از قالب ها به صورت کلی پی برد. در ادامه به توضیح قالب مهم و پرکاربرد GGA می پردازیم. مثال این قالب به صورت زیر است:
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,…,…,*47
- تمامی پیغام های NMEA با کاراکتر $ شروع و هر بخش داده با یک کاما جدا می شود.
- GPبیانگر این است که این داده مربوط به GPS است. GL مربوط به GLONASSو GN مربوط به سامانه GNSSاست.
- پس از آن، فرمت قالب قرار می گیرد. به طور مثال در اینجا GGA قرار گرفته است.
- عدد 123519 زمان UTC از چپ به راست به شکل ساعت، دقیقه و ثانیه است. در این مثال برابر با 12:35:19 است.
- عدد 038عرض جغرافیایی به فرمت DDMM.MMM است. تعداد ارقام اعشار متغیر است.
- حرف N بیانگر نیم کرۀ شمالی است.
- عدد 000طول جغرافیایی به فرمت DDMM.MMM است. تعداد ارقام اعشار متغیر است.
- حرف E بیانگر نیم کرۀ شرقی است.
- عدد 1 بیانگر شاخص کیفیت و انواع آن به به صورت است:
- Invalid = 0
- GPS fix (SPS) = 1
- DGPS fix = 2
- PPS fix = 3
- Real Time Kinematic = 4
- Float RTK = 5
- Estimated (Dead reckoning) (2.3 feature) = 6
- Manual input mode = 7
- Simulation mode = 8
- عدد 08بیانگر تعداد ماهواره های به کار گرفته شده در بدست آوردن این مختصات است.
- عدد 9ضریب تعدیل دقت مسطحاتی است.
- عدد 4 و حرف M بیانگر ارتفاع بالاتر از سطح دریا برحسب متر است.
- عدد 9و حرف Mارتفاع (بر حسب متر) بر مبنی شکل واقعی کرۀ زمین است (یک مدل از کرۀ زمین ژئوئید یا بیضوی است.)
- فیلد خالی: در صورتی که موجود باشد، محتوی این فیلد سن ماهواره است.
- فیلد خالی: در صورتی که موجود باشد، محتوی این فیلد آیدی ماهواره است.
- عدد و کاراکتر *47بیانگر Checksumدادۀ بین علامت “$” و “*” است. (Checksum یک روش کد گذاری برای تشخیص خطا در هنگام ارسال و دریافت است.).
برخی نکات مربوط به NMEA
- در بسیاری از کاربردها، به طور مثال برخی کاربردهای میکروکنترلری، تنها موارد 4 و 5 و 6 و 7 و 8 و 16 از فرمت GGA (توضیحات انتهای بخش قبل)، از دادۀ خروجی یک ماژول موقعیت یاب نیاز است.
- در برخی ماژول ها علاوه بر قابلیت ارسال در قالب های NMEA، قابلیت ارسال در یک قالب پیش فرض ماژول نیز است. به طور مثال در ماژول SIM808 با ارسال دستور AT+CGPSINF=0، اطلاعات در قالب پیش فرض ماژول، توسط درگاه UART ماژول برای کاربر ارسال می شود.
- در برخی از کاربردها، به طور مثال کاربردهای میکروکنترلری، استفاده از قالب GGA به تنهایی نیاز پروژه را مرتفع می کند. اما برخی کاربردها نیازمند اطلاعات دقیق تری از جمله اطلاعاتی در مورد سرعت و آفست ماهواره ها، شمارۀ ماهواره مورد نظر و … هستند که نیازمند استفاده از دیگر قالب ها نیز است.
- در اکثر ماژول های موقعیت یاب امروزی که در تلفن های همراه استفاده می شود، از سامانه GNSSبه جای GPS استفاده شده است. این امر موجب افزایش دقت شده است. همچنین در ماژول های شرکت SIMCOM از جمله ماژول SIM808 و SIM868 نیز از سامانه GNSS استفاده شده که از هر دو سامانۀ GPS و GLONASS استفاده می کنند. درحالی که ماژول های قدیمی تر از جمله SIM908، تنها قابلیت استفاده از GPS را داشته اند.

تصویر 5 – ماژول SIM808
چند نکته دربارۀ ماژول های دارای سامانه GNSS
- در ماژول هایی که قابلیت سامانه GNSS را دارند معمولاً هم می توان از قابلیت GPS به تنهایی استفاده کرد و هم می توان از قابلیت سامانه GNSS استفاده کرد که دقت آن بالاتر است. در هنگام استفاده از این ماژول ها در کاربردهای نیازمند دقت بالا، باید که از AT Commandهای مربوط به سامانه GNSS استفاده شود. چرا که استفاده از GPS به تنهایی، در برخی شرایط از جمله آپارتمان ها، خطایی بین 500 تا 1000 متر دارد.
- در ماژولهایی که قابلیت سامانه GNSS دارند، اگر از AT Commandهای مربوط به GPS استفاده شود، خروجی طول و عرض جغرافیایی در فرمت DMM و در زمانی که از AT Commandهای مربوط به سامانه GNSS استفاده شود، خروجی طول و عرض جغرافیایی با فرمت DD خواهد بود.
- اگر قصد داشته باشید که خروجی طول و عرض جغرافیایی را به صورت مستقیم بر روی Google Map نشان دهید می بایست که از یکی از فرمت های DD و یا DMS استفاده کنید. در چنین کاربردهایی استفاده از فرمت DD نیازمند کدنویسی کمتری به منظور انتقال داده ها در Google Mapاست.
تنظیمات ماژول های سامانه GNSS
برخی ویژگی های ماژول های گیرنده سامانه GNSS را می توان با استفاده از AT Commandها تغییر داد. این امر در برخی موارد مزیت هایی از جمله ساده شدن نرم افزار و کاهش توان مصرفی را به همراه دارد. به طور مثال می توان Update Rate و Baud Rate و Sentence Selection را تغییر داد. قالب پیام در یک مثال به صورت زیر است.
$ PMTK 314 ,0,1,1,0,0,0,0,0,0,0,0,0,0,0 * 34
- قسمت اول = یک بایت = کارکتر $
- قسمت دوم = چهار بایت = عبارت PMTK
- قسمت سوم = سه بایت = عددی بین 000 تا 999 = شناسه ای که به دیکودر، نحوۀ کدگذاری را اطلاع می دهد.
- قسمت چهارم = تعداد بایت متغیر = دادۀ ارسالی که حاوی یک فرمان اجرایی است در این قسمت قرار می گیرد.
- قسمت پنجم = یک بایت = کاراکتر “*” که نشانگر پایان داده است.
- قسمت ششم = دو بایت = در این قسمت Check Sum عبارات بین “$” و “*” قرار دارد.
- قسمت هفتم = دو بایت = کارکترهای CR و LF که بیانگر پایان پیام است.
مثال: با ارسال دستور زیر به ماژول سامانه GNSS می توان مدت زمان بروز رسانی دادۀ سامانه GNSS را 3000ms قرار داد.
AT+CGNSCMD = 0 , “$ PMTK 220 ,3000 * 1D”
دستورات اجرایی با استفاده از AT Command فوق ارسال می شوند. عدد 0 بیانگر فرمت داده ارسالی به صورت NMEA است. چنانچه عدد 1 قرار داده شود، می توان کل قالب پیام را به صورت HEX نوشت. به صورت زیر:
AT+CGNSCMD = 1 , “2420504d544b20323230202c33303030202a20314420”
در ادامه لیستی از دستورات به همراه مختصر توضیح آورده شده است. توجه شود که تمامی دستورات برای همۀ ماژولها قابل استفاده نیست.
| Notes | Parameters | Name | Set |
| Test packet | PMTK_TEST | 0 | |
| Hot start | None | PMTK_CMD_HOT_START | 101 |
| Warm start (ignore eph) | None | PMTK_CMD_WARM_START | 102 |
| Cold start | None | PMTK_CMD_COLD_START | 103 |
| Factory reset | None | PMTK_CMD_FULL_COLD_START | 104 |
| Erase EPO data | None | PMTK_CMD_CLEAR_EPO | 127 |
| Enter standby mode | 0 | PMTK_CMD_STANDBY_MODE | 161 |
| Set NMEA update rate | milliseconds | PMTK_SET_NMEA_UPDATERATE | 220 |
| Extend time for ephemeris | sv,snr,ms,ms | PMTK_CMD_EPH_RECEIVE | 223 |
| Enter power save mode | See docs | PMTK_CMD_PERIODIC_MODE | 225 |
| Setup data port | See docs | PMTK_SET_DPort | 250 |
| Set NMEA baudrate | baudrate | PMTK_SET_NMEA_BAUDRATE | 251 |
| Set output format for current port | mode, baudrate | PMTK_SET_OUTPUT_FMT | 253 |
| Enable AIC | 0 or 1 | PMTK_CMD_AIC_MODE | 286 |
| Enter backup mode | See docs | PMTK_CMD_BACKUP_MODE | 291 |
| Fix update interval | See docs | PMTK_API_SET_FIX_CTL | 300 |
| Set DGPS data source | 0=none 1=RTCM 2=SBAS (WAAS/EGNOS/MSAS) | PMTK_API_SET_DGPS_MODE | 301 |
| Enable SBAS | 0 or 1 | PMTK_API_SET_SBAS_ENABLED | 313 |
| Set NMEA output rates | 0 or 1 | PMTK_API_SET_NMEA_OUTPUT | 314 |
| Set use of SBAS SV w/”test” flag on | 0=use testing 1=integrity only | PMTK_API_SET_SBAS_Mode | 319 |
| Power save mode | 0 or 1 | PMTK_API_SET_PWR_SAV_MODE | 320 |
| Set standard datum | 0 or 1 | PMTK_API_SET_DATUM | 330 |
| Set user-defined datum | 0=WGS84, see docs | PMTK_API_SET_DATUM_ADVANCE | 331 |
| Set user options | See docs | PMTK_API_SET_USER_OPTION | 390 |
| NavSpeedThreshold | meters/s | PMTK_SET_Nav Speed threshold | 397 |
| Enable EASY | cmd,enable | PMTK_CMD_EASY_ENABLE | 869 |
جدول 2 – لیستی از دستورات ماژول های سامانه GNSS
نتایج سامانه GNSS و GPS و سامانه های موقعیت یابی جهانی و محلی:
- سامانه GNSS که مخفف عبارت Global Navigation Satellite System و به معنای سامانه ماهواره ای ناوبری جهانی است، مجموعۀ سیستم های موقعیت یاب جهانی و محلی است.
- روش کار در سیستم ها ناوبری هذلولوی به این شکل بوده که گیرنده با محاسبه فاصله زمانی سیگنال رفت و برگشت بین دکل و گیرنده، به فاصله تا هر ایستگاه و در نتیجه به موقعیت خود دست می یافت.
- با توجه به این که سامانه های ناوبری هذلولوی در سطح جهان به صورت یکپارچه نبوده و تنها در برخی مناطق مورد استفاده قرار می گیرند، به آنها LPSیا Local Positioning System به معنای سامانه موقعیت یاب محلی گفته می شود.
- سامانه GNSS به مجموعۀ سامانه های ماهواره ای ناوبری جهانی و سامانه های موقعیت یاب محلی اطلاق می شود.
- یکی از علل روی آوردن کشورها به ساخت سامانه های ناوبری جهانی یا محلی، این است که آمریکا و روسیه می توانند در زمان جنگ سرویس های GPS و GLONASS را برای آن کشورها غیر فعال کنند.
- دو پروژۀ دیگر که قرار است تا سال 2020 همچون GPS و GLONASS به صورت سراسری سرویس دهی کنند، پروژه Galileo در اروپا و BeiDou در چین است. همچنین دو پروژه مطرح دیگر به نام QZSS در ژاپن و همچنین IRNSS در هند است که به صورت محلی در کشور خود و مناطق اطراف در حال سرویس دهی هستند.
- NMEAیک موسسه است که برای انتقال داده های سامانه های ناوبری ماهواره ای، یک استاندارد به شماره NMEA 0183 بنا نهاده است.
- برای طول و عرض جغرافیایی سه فرمت استاندارد DD و DMS و DMM وجود دارد.
- برخی ویژگی های ماژول های گیرنده سامانه GNSS را می توان با استفاده از AT Commandها تغییر داد. این امر در برخی موارد مزیت هایی از جمله ساده شدن نرم افزار و کاهش توان مصرفی را به همراه دارد.













سلام. الان توی بازار دو ماژول NEO و SIM808 هستن که GPS و GNSS دارن. برای کاربرد ربات پرنده (کوادکوپتر) میخوام. نمیدونم دقت کدومشون بیشتره. ممنون میشم راهنمایی کنید.
سلام. دقت GPS ماژول NEO-6 به صورت نامی 2.5 متر و دقت موقعیت یابی ماژول SIM808 هم به صورت نامی کمتر از 2.5 متر هستش. دقت ماژول های NEO-6 درصورت استفاده از سیستم های SBAS (سیستم الحاقی ماهواره ای) میتونه به یک متر هم برسه. چون کاربرد شما یه کواد کوپتر هستش توصیه میکنم ماژولی رو انتخاب کنید که علوه بر دقت مورد نیاز، مصرف انرژی کمتر، ولتاژ تغذیۀ و همچنین وزن کمتری داشته باشه.
سلام. اطلاع ندارید صنایع نظامی برای هدایت موشک ها از سامانه های موقعیت یاب جهانی استفاده می کنن یا محلی؟
سلام. در این باره اطلاعاتی که درخور پاسخ قابل استناد به سوال شما باشه ندارم.
با سلام gps کاربرد نظامی برای امریکا داره و دقت زیر سانتی متر دارد. برای استفاده عمومی 2 خطای عمدی به نام های ca , ad داره به همین دلیل هستش که دقتش حدود 3 متر هستش
به دلیل وجود این دو خطا و قابل تغییر بودن آن، سایر کشور ها از این سامانه برای موشک استفاده نمیکنن و از سامانه های محلی استفاده میکنن
سلام جناب اسدی. ممنون از مطالب مفیدتون. عالی هستن
سلام. نظر لطف شماست. ممنون