")
delay چه مشکلاتی در برنامه به وجود می آورد؟ روش جایگزین delay چیست؟ چرا باید delay را حذف کرد؟ روش حذف delay چیست؟ چکونه از تایمر به جای delay استفاده کنیم؟ چگونه زمان بندی انجام چند وظیفه را با تایمر انجام دهیم؟ فرمان شروع delay با تایمر چگونه است؟ برای یافتن این سوالات با ما همراه باشید.
delay در برنامه نویسی یک ابزار برای ایجاد تأخیر است. توابع delay که در نرم افزارهای اتمل استودیو، کدویژن، keil و … به کار می گیریم، اغلب با استفاده از حلقه های for و while نوشته شده اند. هنگامی که تابع delay اجرا می شود، برنامه در حلقه های for و while این تابع باقی می ماند تا وقتی که زمان delay سپری شود. در استفاده از توابع delay اگر دستوری پس از این توابع نوشته شده باشد، تا زمان پایان زمان delay اجرا نمی شود. این عملکرد برای برنامه های ساده مشکلی به وجود نمی آورد. ولی در پروژه هایی با حجم پردازش بالا، استفاده از توابع delay معمول امکان پذیر نیست. در میکروکنترلرها یکی از روش های ایجاد تأخیر، استفاده از تایمر است.
در این نوشته به بررسی روش ایجاد delay با تایمر و حذف کتابخانۀ delay.h از پروژه می پردازیم. ما برای این کار یک نمونه کد را در کدویژن بررسی خواهیم کرد. این روش را می توان در نرم افزارهای دیگر برای میکروکنترلرهای دیگر نیز پیاده کرد و محدود به کدویژن و AVR نیست. نمونه کدی که بررسی می کنیم با نمونه کد ویدئوی این نوشته متفاوت است. برای درک بهتر موضوع حذف delay از پروژه و استفاده از تایمر برای ایجاد delay، ویدئوی این نوشته را نیز مشاهده کنید.
فیلم آموزش تایمر در STM32 (فیلم آموزش ARM STM32 مقدماتی)
فیلم آموزش تایمر پیشرفته در STM32
فیلم آموزش تایمر در AVR (فیلم آموزش میکروکنترلرهای AVR مقدماتی)
فیلم آموزش تایمر پیشرفته در AVR
فیلم آموزش تایمر در آردوینو (فیلم آموزش آردوینو مقدماتی)
فیلم آموزش تایمر پیشرفته در آردوینو
کتابخانه Delay برای میکروکنترلر
روش حذف delay از پروژه
منظور ما از حذف delay از پروژه، حذف کامل آن است. یعنی ممکن است کتابخانه ای را از اینترنت دانلود کنیم و در آن از کتابخانۀ delay استفاده شده باشد. باید آن را نیز حذف کنیم. در ادامه می بینیم که چطور به جای delay از تایمر برای ایجاد تأخیر استفاده می کنیم.
نمونه کد با تابع delay
در نمونه کد زیر می بینیم که می خواهیم هر 100 میلی ثانیه یک بار یک واحد به متغیر number اضافه شود و سپس مقدار آن روی LCD نمایش داده شود. همچنین پس از 100 میلی ثانیه پورت B تغییر وضعیت دهد.
while (1)
{
number++;
lcd_clear();
sprintf(lcd_str,"Number=%d",number);
lcd_puts(lcd_str);
delay_ms(100);
PORTB=~PORTB;
}
در این برنامه ابتدا یک واحد به number اضافه می شود، سپس LCD پاک می شود، متغیر number به رشته تبدیل می شود و رشته نمایش داده می شود. بعد از آن یک delay داریم که 100 میلی ثانیه تأخیر ایجاد می کند. در آخر هم دستور PORTB=~PORTB پس از 100 میلی ثانیه تأخیر اجرا می شود.
در این نمونه کد می بینیم که دستور PORTB=~PORTB باید منتظر بماند تا 100 میلی ثانیه سپری شود. فرض کنید ما می خواهیم اضافه شدن به متغیر number و نمایش آن در LCD هر 100 میلی ثانیه یک بار اتفاق بیفتد و دستور PORTB=~PORTB هر 10 میلی ثانیه یک بار اجرا شود. برای این کار لازم است از یک تایمر استفاده و متغیرهایی تعریف کنیم.
استفاده از تایمر برای ایجاد delay
برای این که delay را از پروژه حذف کنیم و کاری کنیم که دستور PORTB=~PORTB هر 10 میلی ثانیه اجرا شود و اضافه شدن به number و نمایش در LCD هر 100 میلی ثانیه اتفاق بیفتد، ابتدا دو استراکچر تعریف می کنیم. در ادامه عملکرد این دو استراکچر را می بینیم.
struct SHOW_LCD_TIME
{
unsigned int counter;
char start_counter;
}show_lcd;
struct PORTB_TOGGLE_TIME
{
unsigned int counter;
char start_counter;
}portb_toggle;
تایمر صفر را با تقسیم فرکانسی 32 در مد نرمال راه اندازی می کنیم. در این صورت زمان سپری شدن هر پلۀ تایمر برابر است با 4 میکروثانیه. اگر تایمر 250 پله بشمارد، زمان 1 میلی ثانیه سپری شده است. برای این که تایمر 250 پله بشمارد و سپس سرریز شود، مقدار رجیستر TCNT0 را برابر 6 قرار می دهیم. وقفۀ سرریز تایمر را نیز فعال می کنیم.
ASSR=0<<AS0;
TCCR0=(1<<CS01) | (1<<CS00);
TCNT0=0x06;
OCR0=0x00;
TIMSK=(1<<TOIE0);
#asm("sei")در روتین وقفۀ سرریز تایمر صفر مقدار TCNT0 را برابر 6 قرار می دهیم. با این کار تایمر صفر از 6 شروع به شمارش می کند. چون تایمر صفر 8 بیتی است، مقدار TCNT0 تا 255 بالا می رود و سپس سرریز می شود. شمردن تایمر از 6 تا 255 و سرریز تایمر (با توجه به فرکانس کلاک تایمر که برابر 250 کیلوهرتز است) زمان 1 میلی ثانیه طول می کشد. پس زمان بین دو سرریز تایمر برابر 1 میلی ثانیه است.
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
TCNT0=0x06;
if(show_lcd.start_counter==YES) show_lcd.counter++;
if(portb_toggle.start_counter==YES) portb_toggle.counter++;
}
در روتین وقفۀ سرریز تایمر صفر دو شرط قرار داده ایم. اگر start_counter را در while بی نهایت برای هر کدام از عملکردهای اضافه کردن به number و نمایش در LCD و دستور PORTB=~PORTB برابر با YES قرار دهیم، هرگاه که روتین وقفۀ سرریز تایمر صفر اتفاق می افتد، یک واحد به متغیرهای counter این عملکردها اضافه می شود. YES و NO را به صورت زیر دیفاین می کنیم.
#define YES 1
#define NO 0دستورهای بدون delay در حلقۀ بی نهایت while
در حلقۀ while برنامه ابتدا متغیرهای start_counter مربوط به عملکردهای مورد نظر را YES می کنیم. با این کار هر بار که وقفه اتفاق بیفتد به مقدار counter این عملکردها یک واحد اضافه می شود. در این مثال خاص شاید متغیر start_counter برای ما کاربردی نداشته باشد. زیرا ما می خواهیم همواره دو عملکرد اجرا شوند. اما در برخی پروژه ها نیاز داریم که delay تحت شرایطی اتفاق بیفتد. بنابراین یک متغیر start_counter تعریف می کنیم که با YES کردن آن، شرایط مورد نظر مهیا شود. در واقع YES کردن این متغیر به معنای فرمان شروع delay است. در اینجا به جای این که یک تابع بنویسیم و delay ایجاد کنیم، با YES کردن متغیر start_counter فرمان شروع تأخیر را می دهیم.
while (1)
{
show_lcd.start_counter=YES;
portb_toggle.start_counter=YES;
if(show_lcd.counter>=100)
{
show_lcd.counter=0;
show_lcd.start_counter=NO;
number++;
lcd_clear();
sprintf(lcd_str,"Number=%d",number);
lcd_puts(lcd_str);
}
if(portb_toggle.counter>=10)
{
portb_toggle.counter=0;
portb_toggle.start_counter=NO;
PORTB=~PORTB;
}
}
در حلقۀ بینهایت while دو شرط قرار داده ایم. اگر مقدار counter برای عملکرد اضافه کردن به number و نمایش در LCD بزرگتر یا مساوی 100 شود، بدان معناست که 100 میلی ثانیه سپری شده است. زیرا (در روتین وقفۀ سرریز تایمر صفر) به متغیر counter برای این عملکرد در هر 1 میلی ثانیه یک واحد اضافه شده است. بنابراین دستورهای مربوط به شرط اول اجرا می شوند. در سطر اول این شرط مقدار counter صفر شده است که دفعۀ بعدی از صفر شروع به افزایش آن شود.
در شرط دوم می بینیم که اگر counter مربوط به دستور PORTB=~PORTB به 10 برسد، این دستور اجرا می شود. با توجه به مقدار 10 برای counter و این که هر 1 میلی ثانیه یک بار به counter اضافه شده، این دستور نیز هر 10 میلی ثانیه یک بار اجرا می شود. اکنون می توانیم توابع delay و کتابخانۀ delay.h را از برنامه پاک کنیم.
نتیجۀ حذف delay را ببینیم
در نرم افزار Proteus می توانیم ببینیم که مقدار Number هر 100 میلی ثانیه یک بار اضافه می شود و پورت B هر 10 میلی ثانیه یک بار تغییر وضعیت می دهد.
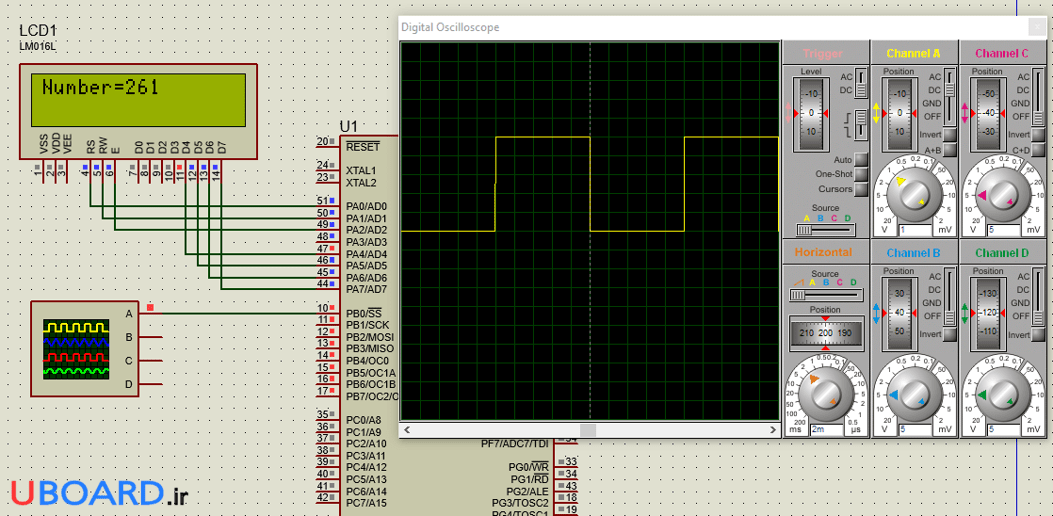
تصویر 1 – نتیجۀ حذف delay در Proteus
برای درک بهتر نحوۀ برنامه نویسی برای حذف delay از پروژه، پیشنهاد می کنیم ویدئوی این نوشته را مشاهده کنید. فایل های برنامۀ نوشته شده و همچنین شبیه سازی آن در پیوست موجود است.
اهمیت مدیریت زمانی در پروژه ها
در اغلب پروژه های کاربردی میکروکنترلر باید چندین وظیفه را انجام دهد. برخی از این وظایف لازم است همزمان انجام شوند، برخی دیگر نیز پشت سر هم با توالی زمانی خاص. این توالی زمانی و همزمان انجام شدن وظایف به نوع و روش کدنویسی نیز بستگی دارد. اما یکی از وجوه مشترک همۀ پروژه های کاربردی، زمان بندی انجام وظایف است. در صورتی که خللی در زمان بندی انجام وظایف پیش بیاید، همه یا بخشی از عملکرد پروژه دچار اختلال و یا از کار افتادن کامل می شود. بنابراین نرم افزار پروژه باید طوری باشد که زمان بندی آن به صحیح ترین شکل ممکن انجام شود.
یکی از نکات مهمی که در برنامه نویسی چنین پروژه هایی باید رعایت شود، استفاده نکردن از delay در برنامه است. delay هایی که با استفاده از حلقه های for و while نوشته می شوند باعث می شوند که برنامه در گیر حلقه های آنها شود و دستورهای بعد از delay تا اتمام delay اجرا نشود. در روشی که استفاده کردیم اگر فرض کنیم زمان اجرای دستورها صفر است (که البته نیست) می توان گفت وظایف دقیقاً در زمان های تعیین شده در حال انجام شدن است. برای درک بهتر این مطلب فرض کنید می خواهیم PORTA هر 2 میلی ثانیه یک بار toggle شود، PORTB هر 37 ثانیه یک بار toggle شود، هر 7 میلی ثانیه یک بار کی پد اسکن شود و هر 53 میلی ثانیه یک بار نیز LCD رفرش شود. اگر هم بشود با ایجاد delay با توابع کتابخانۀ delay.h این کار را انجام داد، هم روشی اصولی نیست و هم خیلی مشکل خواهد شد. اما اگر با تایمر بخواهیم این کار را انجام دهیم با تعریف متغیرها و فعال کردن تایمر و وقفۀ تایمر به راحتی این کار قابل اجرا و قابل تعمیم برای وظایف دیگر است.
ویدئوی 1 – ساخت تأخیر با تایمر در STM32
کتابخانه Delay برای میکروکنترلر
از روش حذف delay از پروژه ها نتیجه می گیریم:
- در پروژه هایی که لازم است چند وظیفه با زمان بندی بدون تأخیر انجام شود، برای ایجاد delay نباید از توابع delay کتابخانۀ h و توابع delay نوشته شده با حلقه های for و while استفاده کنیم.
- اگر دستوری پس از توابع delay (که متعلق به کتابخانۀ h هستند و یا در آنها از for و while برای ایجاد تأخیر استفاده شده) نوشته شود، تا وقتی که زمان delay سپری نشود، آن دستور اجرا نمی شود.
- حذف delay از پروژه باید شامل تمام توابع delay در فایل هایی که خودمان نوشته ایم و فایل هایی که دانلود کرده ایم باشد. یعنی در هیچ جای برنامه از delay استفاده نکرده باشیم.
- در استفاده از تایمر برای ایجاد delay بهتر است زمان های روند به وجود بیاوریم.
- از مد CTC تایمر و مدهای دیگر هم می توانیم استفاده کنیم. لزومی ندارد که حتماً از مد نرمال استفاده کنیم.
- در نمونه کدی که بررسی کردیم، فرمان شروع delay در واقع YES کردن متغیر start_counter است.












سلام استاد اسدی. این مورد که قرار دادید حذف delay و استفاده از تایمر بجای اون هست. در مورد استفاده از OS ها برای مدیریت زمانی پروژه اگر لطف کنید مطلبی قرار بدید. تشکر
سلام. حتماً در آینده در نوشته هایی به موضوع OSها و RTOS می پردازیم.
سلام. خیلی مطلب مفیدی بود. ممنون از این که این مطالب رو آموزش میدید. این ویدئو مربوط به کدوم دورۀ آموزشیتون هست؟ آموزش میکروکنترلر AVR یا آموزش زبان برنامه نویسی C میکروکنترلرها؟
سلام. خواهش میکنم. توی آموزش زبان C میکروکنترلرها به این موضوع پرداخته شده.
سلام. مثالی که توضیح دادید سوالاتمو پاسخ داد. فقط این که تا چه تعداد تابع و عملکرد میتونیم با این روش اجرا کنیم که تقریبا real time اجرا بشن؟ ممنون
سلام. نمیشه پاسخ قطعی به این سوال داد. همه چی بستگی به شرایط پروژه و سبک کدنویسی داره. هر چی تعداد توابع و عملکردهای اجرایی بیشتر باشه مسلماً از Real Time بودن برنامه کم میشه.
دوست عزیز یا بهتر بگم استاد گرامی خیلی بیان بالایی دارین.
ممنون.
خیلی ممنون. نظر لطف شماست
در صورتي كه درهر ثانيه ٢٥٠ درخواست وارد شود و پردازش هر درخواست ٢ ميلي ثانيه زمان ببرد.